《微积分学教程(第一卷)》 第三章 导数及微分 1 导数及其求法
求动点速度的问题
我们将从特殊的例题开始,就是考察有重量的质点在真空中(为着不计空气的阻力)的自由降落.
若时间$t$(秒)是从开始降落的时候计算起的,则在这段时间内所经过的路程$s$(米),依已知的公式可表示为
$$s=\dfrac{g}{2} t^2 ,\label{1} \tag{1} $$
式中$g=9.81$(米/秒$^2$).由此出发,需要确定质点在时刻$t$[即当质点在位置$M$时(图$36$)]的运动的速度$v$.
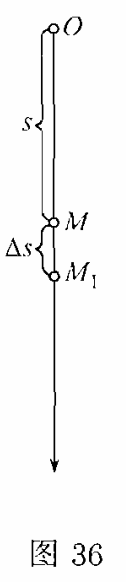
给变量$t$加一增量$\Delta t$,并考察时刻$t+\Delta t$,其时质点在位置$M_1 $.在时间$\Delta t$内的路程的增量$MM_1 $记成$\Delta s$.
在$\eqref{1} $内用$t+\Delta t$代换$t$,则得路程的新值的表达式
$$s+\Delta s=\dfrac{g}{2} (t+\Delta t)^2,$$
由此
$$\Delta s=\dfrac{g}{2} (2t\cdot \Delta t+\Delta t^2).$$
用$\Delta t$除$\Delta s$,我们就得到质点在区间$MM_1 $内降落的平均速度:
$$\overline{v} =\dfrac{\Delta s}{\Delta t} =gt+\dfrac{g}{2} \cdot \Delta t.$$
可见,这速度随着$\Delta t$的变动而变动着,故知在时刻$t$以后所经过的时间$\Delta t$愈少,就愈能更好地表达出质点在时刻$t$的降落情况.
当$\Delta t$趋向于零时质点在时间$\Delta t$内的平均速度$\overline{v} $的极限$v$称为质点在时刻$t$的速度.
在目前的情形,显然
$$v=\lim_{\Delta t\to 0} \left( gt+\dfrac{g}{2} \cdot \Delta t\right) =gt.$$
类似地,可以算出质点在一般直线运动中的速度$v$,质点的位置由它到某一始点$O$的距离$s$所确定;这距离即称为它所经过的路程.时间$t$由某一起始的时刻算起,而且并不一定要从质点在位置$O$的时刻算起.当已经知道运动方程:$s=f(t)$时,运动就作为完全给定的了.质点在任何时刻的位置即可由运动方程确定;在刚才考察的例题内,方程$\eqref{1} $就担任着这种角色.
要确定在所给的时刻$t$的速度$v$,必须同上面那样给$t$以增量$\Delta t$;路程$s$就对应地增大$\Delta s$.比式
$$\dfrac{\Delta s}{\Delta t} $$
表示出在时间$\Delta t$内的平均速度$\overline{v} $.由此,使趋向极限,就得出在时刻$t$的真实速度$v$:
$$v=\lim_{\Delta t\to 0} \overline{v} =\lim_{\Delta t\to 0} \dfrac{\Delta s}{\Delta t} .$$
以下我们将考察另一重要的问题,也将导致相似的极限运算.
在曲线上作切线的问题
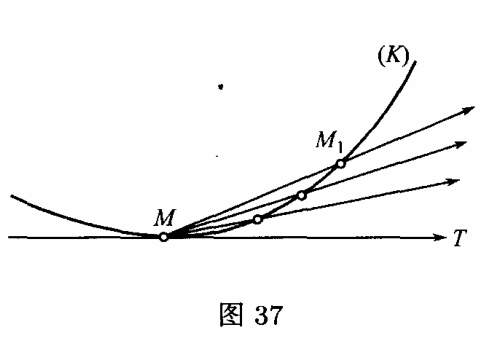
设已给曲线$(K)$及其上一点$M$(图$37$);今将建立曲线在点$M$处的切线的概念.
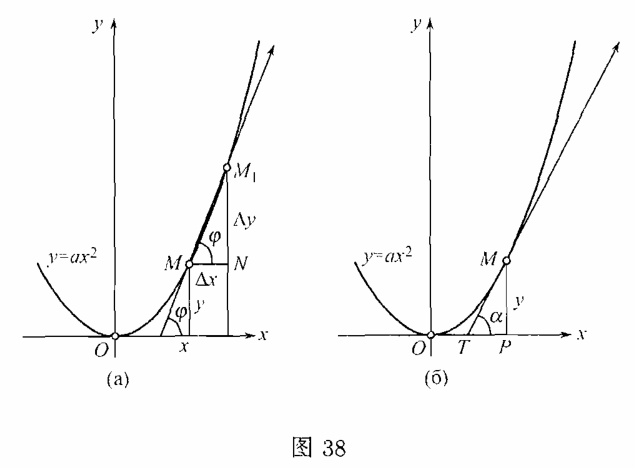
在中学教本内,圆的切线即定义为“与曲线只有一个公共点的直线”.但这定义有特殊性,不能说明相切的本质.例如,若企图应用这定义于抛物线$y=ax^2$(图$38,а$),则在原点$O$处两坐标轴都适合这定义;但在这时大概读者也能立刻明白,事实上仅$x$轴是抛物线在点$O$处的切线!
现在我们就将给出切线的普遍定义.在曲线$(K)$上(图$37$),除点$M$以外再取一点$M_1 $,并引割线$MM_1 $.当点$M_1 $沿曲线移动时,这割线就绕点$M$而转动.
当点$M_1 $沿曲线$(K)$而趋于与$M$重合时,割线$MM_1 $的极限位置$MT$就称为曲线$(K)$在点$M$处的切线(这定义的意义就是,只要弦$MM_1 $充分小,$\angle M_1 MT$就可成为任意小).
例如,应用这定义求抛物线$y=ax^2$的任意点$M(x,y)$处的切线.因为切线经过这点,那么,要正确地表示它的位置,只要再知道它的斜率就够了.这样,问题就归结于:求在点$M$处切线的斜率$\tan{\alpha } $.
给横标$x$以增量$\Delta x$,即由曲线上的点$M$点移至$M_1 $,这点有横标$x+\Delta x$及纵标
$$y+\Delta y=a\cdot (x+\Delta x)^2$$
(图$38,а$).割线$MM_1 $的斜率$\tan{\varphi } $由$\triangle MNM_1 $内确定.在这三角形内直角边$MN$等于横标的增量$\Delta x$,而直角边$NM_1 $显然是纵标的对应增量
$$\Delta y=a\cdot (2x\cdot \Delta x+\Delta x^2),$$
于是
$$\tan{\varphi } =\dfrac{\Delta y}{\Delta x} =2ax+a\cdot \Delta x.$$
要得出切线的斜率,很易理解,需要求上式当$\Delta x\to 0$时的极限.这样,我们就得结果
$$\tan{\alpha } =\lim_{\Delta x\to 0} (2ax+a\cdot \Delta x)=2ax.$$
[顺便指出,由此推得抛物线的切线的实际作图的简法.就是$\triangle MPT$(图$38,б$),线段
$$TP=\dfrac{y}{\tan{\alpha } } =\dfrac{ax^2}{2ax} =\dfrac{x}{2} ,$$
于是$T$是线段$OP$的中点.因此,要作出抛物线在点$M$处的切线,只要平分线段$OP$,把它的中点同$M$连接起来就是.]
在任意曲线的情形,设曲线有方程
$$y=f(x),$$
其切线的斜率可用相似的方法来确定.与横标的增量$\Delta x$对应的纵标的增量是$\Delta y$,比式
$$\dfrac{\Delta y}{\Delta x} $$
表示割线$\tan{\varphi } $.求这比式当$\Delta x\to 0$时的极限,就得出切线的斜率
$$\tan{\alpha } =\lim_{\Delta x\to 0} \tan{\varphi } =\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} .$$
导数的定义
在解决上面所考察的两个基本问题时,我们所施行的演算,把它们对照起来,就很容易看出,在两种情形内——若抽去变量的意义上的差别——本质上是同一个做法:函数的增量除以自变量的增量,再算出这比式的极限.用这种方法我们就达到微分学的基本概念——导数的概念.
设函数$y=f(x)$是在区间$\mathcal{X} $内定义着的.从自变量的某一数值$x=x_0 $出发,给它加一增量$\Delta x\lessgtr 0$使不越出区间$\mathcal{X} $,于是新值$x_0 +\Delta x$亦属于这区间.那时函数值$y=f(x_0 )$将换成新值$y+\Delta y=f(x_0 +\Delta x)$,即获得增量
$$\Delta y=\Delta f(x_0 )=f(x_0 +\Delta x)-f(x_0 ).$$
若函数的增量$\Delta y$与引起这增量的自变量的增量$\Delta x$的比式当$\Delta x$趋向于$0$时的极限存在,即
$$\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\lim_{\Delta x\to 0} \dfrac{f(x_0 +\Delta x) -f(x_0 )}{\Delta x} $$
存在,这极限就称为函数$y=f(x)$当$x=x_0 $时(或在所给点处$x=x_0 $处)关于自变量$x$的导数.
这样,对于自变量的定值$x=x_0 $,函数的导数——如果存在的话——是一个确定的数;
暂时限于上述极限为有限的情形[参阅[无穷导数]].
若在全区间$\mathcal{X} $内,即对这区间内的每一$x$的数值,导数总存在着,则它仍是$x$的函数.
应用刚才引入的概念,则在[求动点速度的问题]内讲过的动点的速度就可以简括地说成:
速度$v$是动点所经过的路程$s$关于时间$t$的导数.若在更普遍的意义上来理解“速度”这名词,就可以永远把导数当作某一种“速度”来处理.就是,有了自变量$x$的函数$y$,就可以提出变量$y$关于自变量$x$(当已给$x$值时)的变化率(变动的速度)的问题.
若加于$x$的增量$\Delta x$引起$y$的增量$\Delta y$,则仿照[求动点速度的问题],比式$\dfrac{\Delta y}{\Delta x} $就可以作为当$x$变动一数量$\Delta x$时$y$关于$x$的平均变化率:
$$\overline{V} =\dfrac{\Delta y}{\Delta x} .$$
当$\Delta x$趋向于$0$时这比式的极限自然就称为$y$在所给$x$值时的变化率:
$$V=\lim_{\Delta x\to 0} \overline{V} =\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} ,$$
即刚好是$y$关于$x$的导数.
在[在曲线上作切线的问题]内我们曾考察由方程$y=f(x)$所给定的曲线,并已解决在给定点处引一切线的问题.现在我们可以把所得的结果叙述为:
切线的斜率$\tan{\alpha } $是纵标$y$关于横标$x$的导数.
导数的这一几何说明经常是有用处的.
我们再补充几个类似于上面已考察过的例子以说明导数的概念.
若运动的速度$v$不是常量,它本身亦随着时间$t$的过程而变动;$v=f(t)$,则称“速度的变化率”为加速度.
就是,若对应于时间的增量$\Delta t$速度的增量为$\Delta v$,则比式
$$\overline{a} =\dfrac{\Delta v}{\Delta t} $$
表示出在时间$\Delta t$内的平均加速度,而它的极限就给出在所给时刻的运动的加速度
$$a=\lim_{\Delta t\to 0} \overline{a} =\lim_{\Delta t\to 0} \dfrac{\Delta v}{\Delta t} .$$
这样,加速度是速度关于时间的导数.
在热学方面,我们将用导数以建立物体以建立在所给温度时的热容量的概念.
用下面的记号表示这问题内引入的物理量:$\theta $是温度(摄氏度),$W$是使物体从$0\, ^{\circ} \mathrm{C} $加热至$\theta \, ^{\circ } \mathrm{C} $所需要的热量(卡).显然$W$是$\theta $的函数:$W=f(\theta )$.给$\theta $以一增量$\Delta \theta $,则$W$亦得一增量$\Delta W$.物体从$\theta \, ^{\circ } \mathrm{C} $加热至$(\theta +\Delta \theta )\, ^{\circ } \mathrm{C} $时的平均热容量就是
$$\overline{c} =\dfrac{\Delta W}{\Delta \theta } .$$
但一般地说,因为当$\Delta \theta $变动时这平均热容量亦变动着,我们就不能用它作为在所给温度$\theta $时的热容量.要得出后者,必须将上式取极限:
$$c=\lim_{\Delta \theta \to 0} \overline{c} =\lim_{\Delta \theta \to 0} \dfrac{\Delta W}{\Delta \theta } .$$
因此,可以说,物体的热容量是热量关于温度的导数.
最后,从电学内取出一个例子:建立在所给时刻的电流强度的概念.
用$t$表示从某一时刻算起的时间(秒),用$Q$表示在这时间内流过导线的横截面的电量(库仑).显然$Q$是$t$的函数:$Q=f(t)$.仿照以前的论断,可得在时间$\Delta t$内的平均电流强度是
$$\overline{I} =\dfrac{\Delta Q}{\Delta t} ,$$
而在所给时刻的电流强度则可由极限
$$I=\lim_{\Delta t\to 0} \overline{I} =\lim_{\Delta t\to 0} \dfrac{\Delta Q}{\Delta t} $$
来表示.即电流程度是流过的电量关于时间的导数.
一切这些导数的应用(很容易再多举一些)十分鲜明地表明着一个事实,即导数的概念与各种知识领域内的基本概念是很紧密地关联着的.
导数的求法,其性质的研究及应用就是微分学的主要的研究对象.
导数的表示法常使用各种记号:
$\dfrac{\mathrm{d} y}{\mathrm{d} x} $或$\dfrac{\mathrm{d} f(x_0 )}{\mathrm{d} x} \quad \quad \quad $莱布尼茨($\text{G.W.Leibniz} $);
我们暂时把莱布尼茨的记法当作整个记号看待;下面[可微性与导数存在之间的关系]我们将看到,它们也可以当作分式看待.
$y’$或$f’(x_0 )\quad \quad \quad \quad $拉格朗日($\text{J.L.Lagrange} $);
$\mathrm{D} y$或$\mathrm{D} f(x_0 ) \quad \quad \quad $柯西($\text{A.L.Cauchy} $).
以后我们使用拉格朗日的简单的表示法为主.若应用函数表示法$f’(x_0 )$,则在括号内的字母$x_0 $就指在取导数时的那个自变量的数值.最后须指出,有时,当关于哪一个变量而取导数(同它比较以确定“函数的变化率”)都可能发生怀疑时,这变量就用下标的形式写出:
$$y’_x ,f’_x (x_0 ),\mathrm{D}_x y,\mathrm{D}_x f(x_0 ),$$
并且下标$x$与正在取导数的自变量的特殊数值$x_0 $并无关系.
(在某种意义上,可以说,整个记号
$$\dfrac{\mathrm{d} f}{\mathrm{d} x} ,f’或f’_x ,\mathrm{D} f或\mathrm{D}_x f$$
就担任着导函数的函数记号的角色.)
现在应用刚才引入的表示导数的记号,记下前面得出的某些结果.对于运动的速度就有:
$$v=\dfrac{\mathrm{d} s}{\mathrm{d} t} \quad 或\quad v=s’_t ,$$
对于加速度就有:
$$a=\dfrac{\mathrm{d} v}{\mathrm{d} t} \quad 或\quad a=v’_t .$$
类似地,曲线$y=f(x)$的切线的斜率就写成:
$$\tan{\alpha } =\dfrac{\mathrm{d} y}{\mathrm{d} x} \quad 或\quad \tan{\alpha } =y’_x ,$$
以及其他等等.
求导数的例题
现求一系列的初等函数的导数作为例题.
$1^{\circ } \quad $首先注意到明显的结果:若$y=c=$常量,则不论$\Delta x$是怎样的,恒有$\Delta y=0$,于是$y’=0$;又若$y=x$,则$\Delta y=\Delta x$,而$y’=1$.
$2^{\circ } \quad $今设$y=x^n $,此处$n$是自然数.给$x$以增量$\Delta x$;
若所求的是变元的任意值时的导数,则通常就用那表示变元的字母来表示它,而不加任何下标.
则$y$的新的数值就是
$$y+\Delta y=(x+\Delta x)^n=x^n +nx^{n-1} \cdot \Delta x+\dfrac{n(n-1)}{1\cdot 2} x^{n-2} \cdot \Delta x^2 +\cdots .$$
于是
$$\Delta y=nx^{n-1} \cdot \Delta x +\dfrac{n(n-1)}{1\cdot 2} x^{n-2} \cdot \Delta x^2 +\cdots ,$$
而
$$\dfrac{\Delta y}{\Delta x} =nx^{n-1} +\dfrac{n(n-1)}{1\cdot 2} x^{n-2} \cdot \Delta x+\cdots .$$
因为当$\Delta x\to 0$时除首项以外的一切项都趋向于零,故
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =nx^{n-1} .$$
$3^{\circ } \quad $若$y=\dfrac{1}{x} $,则$y+\Delta y=\dfrac{1}{x+\Delta x} $,于是
$$\Delta y=\dfrac{1}{x+\Delta x} -\dfrac{1}{x} =\dfrac{-\Delta x}{x(x+\Delta x)} ,$$
而
$$\dfrac{\Delta y}{\Delta x} =-\dfrac{1}{x(x+\Delta x) } .$$
由此
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =-\dfrac{1}{x^2} .$$
这时当然假定$x\neq 0$.
$4^{\circ } \quad $考察函数$y=\sqrt{x} (x > 0)$.就有:
$$y+\Delta y=\sqrt{x+\Delta x} ,$$
$$\Delta y=\sqrt{x+\Delta x} -\sqrt{x} =\dfrac{\Delta x}{\sqrt{x+\Delta x} +\sqrt{x} } ,$$
$$\dfrac{\Delta y}{\Delta x} =\dfrac{1}{\sqrt{x+\Delta x} +\sqrt{x} } ;$$
最后,利用根式的连续性,就得
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\dfrac{1}{2\sqrt{x} } .$$
一切这些结果,都可包含在下面的情形内作为它的特殊情形.
$5^{\circ } \quad $幂函数:$y=x^{\mu} $(此处$\mu $是任意实数).$x$的变动区域依赖于$\mu $;它已在[几类最重要的函数,2°]内被指出.我们有($x\neq 0$时)
$$\dfrac{\Delta y}{\Delta x} =\dfrac{(x+\Delta x)^{\mu } -x^{\mu } }{\Delta x} =x^{\mu -1} \cdot \dfrac{\left( 1+\dfrac{\Delta x}{x} \right) ^{\mu} -1}{\dfrac{\Delta x}{x} } .$$
若利用[函数的连续性在计算极限时的应用[5)(в)]]内已算出的极限,便有
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\mu x^{\mu -1} .$$
若$\mu > 1$,则很易直接求得在$x=0$时的导数值:$y’=0$.
在特殊情形
若
$$y=\dfrac{1}{x} =x^{-1} ,$$
则$y’=(-1)\cdot x^{-2} =-\dfrac{1}{x^2} ,$
若
$$y=\sqrt{x} =x^{\frac12 } ,$$
则$y’=\dfrac12 x^{-\frac12 } =\dfrac{1}{2\sqrt{x} } .$
$6^{\circ } \quad $指数函数:$y=a^x (a > 0,-\infty < x < +\infty )$.此处
$$\dfrac{\Delta y}{\Delta x} =\dfrac{a^{x+\Delta x} -a^x }{\Delta x} =a^x \cdot \dfrac{a^{\Delta x} -1}{\Delta x} ,$$
利用[函数的连续性在计算极限时的应用[5)(б)]]内已算出的极限,可得:
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =a^x \cdot \ln a.$$
特殊情形,
若$y=e^x $,则亦得$y’=e^x $.
因此,指数函数(在$a > 1$时)的增大率与函数值成比例:函数达到愈大的数值时,它在该时刻就增大得愈快.这就表出指数函数增大的准确性质,我们在前面也已经讲到过它了参阅[[无穷大的分阶]].
$7^{\circ } \quad $对数函数:$y=\log_ax (0 < a\neq 1,0 < x < +\infty )$.在这情形
$$\dfrac{\Delta y}{\Delta x} =\dfrac{\log_a (x+\Delta x) -\log_ax }{\Delta x} =\dfrac{1}{x} \cdot \dfrac{\log_a \left( 1+\dfrac{\Delta x}{x} \right) }{\dfrac{\Delta x}{x} } .$$
利用[函数的连续性在计算极限时的应用[5)(а)]]内已算出的极限:
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\dfrac{\log_ae }{x} .$$
特殊情形,对于自然对数就得出非常简单的结果:
在
$$y=\ln x$$
时有$y’=\dfrac{1}{x} .$$
这是作理论研究时宁愿采用自然对数的一种(虽然在本质上并非新的)根据.
对数函数(在$a > 1$时)的增大率与变元的数值成反比,且在变元无限增大时它保持着正值而趋于零,这情况与以前[无穷大的分阶]所讲过的是符合的.
$8^{\circ } \quad $三角函数$\quad $设$y=\sin{x} $,则
$$\dfrac{\Delta y}{\Delta x} =\dfrac{\sin{(x+\Delta x)} -\sin{x} }{\Delta x} =\dfrac{\sin{\dfrac{\Delta x}{2} } }{\dfrac{\Delta x}{2} } \cdot \cos{\left( x+\dfrac{\Delta x}{2} \right) } .$$
利用函数$\cos{x}$的连续性及已知的极限[例题,8)]$\displaystyle \lim_{\alpha \to 0} \dfrac{\sin{\alpha } }{\alpha } =1$,就得
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\cos{x} .$$
注意,这公式的简洁性应归功于用弧度来做角度的单位,假使我们用度数来做角度的单位,则正弦与角的比值的极限将不等于$1$,而很易看出是$\dfrac{\pi }{180} $,那时我们将有
$$(\sin{x} )’=\dfrac{\pi }{180} \cos{x} .$$
类似地,我们可以求:
若$y=\cos{x} $,则$y’=-\sin{x} $.
在$y=\tan{x} $时,有
$$\begin{align}
\dfrac{\Delta y}{\Delta x} & =\dfrac{\tan{(x+\Delta x)} -\tan{x} }{\Delta x} \\
& =\dfrac{\dfrac{\sin{(x+\Delta x)} }{\cos{(x+\Delta x)} } -\dfrac{\sin{x} }{\cos{x} } }{\Delta x} \\
& =\dfrac{\sin{(x+\Delta x)} \cdot \cos{x} -\cos{(x+\Delta x)} \cdot \sin{x} }{\Delta x \cdot \cos{x} \cdot \cos{(x+\Delta x)} } \\
& =\dfrac{\sin{\Delta x} }{\Delta x} \cdot \dfrac{1}{\cos{x} \cdot \cos{(x+\Delta x)} } .\\
\end{align}$$
由此,同上面一样,
$$y’=\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\dfrac{1}{\cos{} ^2 x} =\sec{} ^2 x.$$
类似地,
若$y=\cot{x} $,则$y’=-\dfrac{1}{\sin{} ^2 x} =-\csc{} ^2 x.$
反函数的导数
在求反三角函数的导数之前,先证明下面的普遍的定理.
定理$\quad $设$1)$函数$f(x)$满足[反函数的存在]中关于反函数存在的定理的条件,$2)$在点$x_0$有异于零的有限导数$f’(x_0 )$.于是在对应点$y_0 =f(x_0 )$反函数$g(y)$的导数$g’(y_0 )$也存在,且等于$\dfrac{1}{f’(x_0 )}$.
证明$\quad $给数值$y=y_0 $以任意的增量$\Delta y$,则函数$x=g(y)$亦将获得对应的增量$\Delta x$.注意,在$\Delta y\neq 0$时,由于函数$y=f(x)$的单值性,亦必有$\Delta x\neq 0$.就有
$$\dfrac{\Delta x}{\Delta y} =\dfrac{1}{\dfrac{\Delta y}{\Delta x} } .$$
今若(依任意规律)使$\Delta y\to 0$,则——由于假定函数$x=g(y)$是连续的——增量$\Delta x\to 0$.但那时上式右端的分母趋于极限$f’(x_0 )\neq 0$,因此,左端的极限存在,且等于其倒数$\dfrac{1}{f’(x_0 )} $;它就是导数$g’(y_0 )$.
因此,就有简单的公式:
$$x’_y =\dfrac{1}{y’_x} .$$
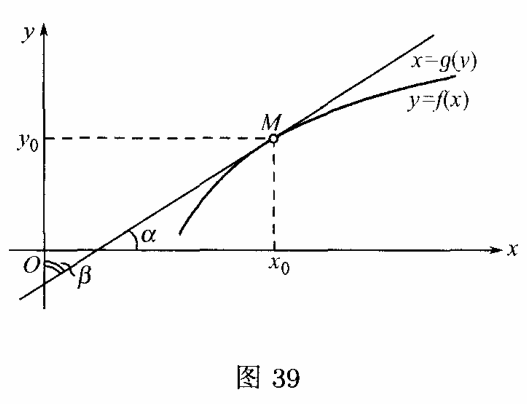
很易说明它的几何意义.我们知道,导数$y’_x $是函数$y=f(x)$的图像上的切线与$x$轴间的角$\alpha $的正切.但反函数$x=g(y)$有着同一的图像,不过它的自变量是$y$罢了.因此导数$x’_y $等于同一切线与$y$轴间的角$\beta $的正切(图$39$).这样,上面导出的公式就变成大家知道的关系式
$$\tan{\beta } =\dfrac{1}{\tan{\alpha } } ,$$
其中$\alpha $与$\beta $之和等于$\dfrac{\pi }{2} $.
令$y=a^x $作为例子.它的反函数就是$x=\log_ay $.因为(参阅$6^{\circ }$)$y’_x =a^x \cdot \ln a$,故依目前的公式,有
$$x’_y =\dfrac{1}{y’_x } =\dfrac{1}{a^x \cdot \ln a} =\dfrac{\log_ae }{y} ,$$
与$7^{\circ }$相符合.
现在要转到求反三角函数的导数,为了方便,我们把变量$x$与$y$互相对调,把已证明的公式改写成
$$y’_x =\dfrac{1}{x’_y } .$$
$9^{\circ } \quad $反三角函数$\quad $考察函数$y=\arcsin{x} (-1 < x < 1)$,其中$-\dfrac{\pi}{2} < y < \dfrac{\pi }{2} $.它是$x=\sin{y} $的反函数.函数$x=\sin{y} $当$y$在刚才指定的范围内时有正值的导数$x’_y =\cos{y} $,在这种情形导数$y’_x $也存在,且依我们的公式
$$y’_x =\dfrac{1}{x’_y } =\dfrac{1}{\cos{y} } =\dfrac{1}{\sqrt{1-\sin{} ^2 y} } =\dfrac{1}{\sqrt{1-x^2} } ;$$
因$\cos{y} > 0$,根式前应取正号.
我们除去$x=\pm 1$的数值,因为与它对应的数值是$y=\pm \dfrac{\pi }{2} $,在这时导数$x’_y =\cos{y} =0$.
函数$y=\arctan{x} (-\infty < x < +\infty )$是函数$x=\tan{y} $的反函数.依我们的公式
$$y’_x =\dfrac{1}{x’_y } =\dfrac{1}{\sec{} ^2 y} =\dfrac{1}{1+\tan{} ^2 y} =\dfrac{1}{1+x^2} .$$
类似地可以得出
对于
$$y=\arccos{x} ,y’=-\dfrac{1}{\sqrt{1-x^2} } \quad (-1 < x < 1),$$
对于
$$y=\text{arccot} \;x ,y’=-\dfrac{1}{1+x^2} \quad (-\infty < x < \infty ).$$
导数公式一览表
现在把我们已求出的一切导数公式列成一览表如下:
$$\begin{array}{lll}
1 . & \quad y=c & \quad y’=0 \\
2 . & \quad y=x & \quad y’=1 \\
3 . & \quad y=x^{\mu} & \quad y’=\mu x^{\mu -1} \\
& \quad y=\dfrac{1}{x} & \quad y’=-\dfrac{1}{x^2} \\
& \quad y=\sqrt{x} & \quad y’=\dfrac{1}{2\sqrt{x} } \\
4 . & \quad y=a^x & \quad y’=a^x \cdot \ln a \\
& \quad y=e^x & \quad y’=e^x \\
5 . & \quad y=\log_ax & \quad y’=\dfrac{\log_ae }{x} \\
& \quad y=\ln x & \quad y’=\dfrac{1}{x} \\
6 . & \quad y=\sin{x} & \quad y’=\cos{x} \\
7 . & \quad y=\cos{x} & \quad y’=-\sin{x} \\
8 . & \quad y=\tan{x} & \quad y’=\sec{} ^2 x =\dfrac{1}{\cos{} ^2 x} \\
9 . & \quad y=\cot{x} & \quad y’=-\csc{} ^2 x =-\dfrac{1}{\sin{} ^2 x} \\
10 . & \quad y=\arcsin{x} & \quad y’=\dfrac{1}{\sqrt{1-x^2} } \\
11 . & \quad y=\arccos{x} & \quad y’=-\dfrac{1}{\sqrt{1-x^2} } \\
12 . & \quad y=\arctan{x} & \quad y’=\dfrac{1}{1+x^2 } \\
13 . & \quad y=\text{arccot} \;x & \quad y’=-\dfrac{1}{1+x^2 } \\
\end{array}$$
函数的增量的公式
先在这里证明两个简单的命题,它们在以后是有用的.
设函数$y=f(x)$是在区间$\mathcal{X} $内定义着的.从这区间内的一个固定值$x=x_0 $出发,用$\Delta x\gtrless 0$表示$x$的任意增量,但须限制$x_0 +\Delta x$使不越出$\mathcal{X} $的范围以外.于是对应的函数的增量就是
$$\Delta y=\Delta f(x_0 ) =f(x_0 +\Delta x) -f(x_0 ).$$
$1^{\circ} \quad $若函数$y=f(x)$在点$x_0 $处有(有限的)导数$y’_x =f’(x_0 )$,则函数的增量可以表示为如下的形式:
$$\Delta f(x_0 ) =f’(x_0 )\cdot \Delta x+\alpha \cdot \Delta x\label{2} \tag{2} $$
或更简短地
$$\Delta y=y’_x \cdot \Delta x+\alpha \cdot \Delta x,\label{21} \tag{2a} $$
式中的$\alpha $是依赖于$\Delta x$的量,且随着$\Delta x$一同趋于零.
因为由导数的定义,在$\Delta x\to 0$时
$$\dfrac{\Delta y}{\Delta x} \to y’_x ,$$
故令
$$\alpha =\dfrac{\Delta y}{\Delta x} -y’_x ,$$
就看出也有$\alpha \to 0$.由此解出$\Delta y$,即得公式$\eqref{21} $.
因为量$\alpha \cdot \Delta x$(在$\Delta x\to 0$时)是较$\Delta x$更高阶的无穷小,故使用在[无穷小的比较]内引入的记法,我们的公式就可以改写成
$$\Delta f(x_0 ) =f’(x_0 )\cdot \Delta x+o(\Delta x) \label{3} \tag{3} $$
或
$$\Delta y=y’_x \cdot \Delta x+o(\Delta x).\label{31} \tag{3a} $$
附注$\quad $到现在为止,我们算作$\Delta x\gtrless 0$;故量$\alpha $在$\Delta x=0$时是不曾定义的.当我们说在$\Delta x\to 0$时$\alpha \to 0$,必已预先假设(像通常那样)$\Delta x$系依任意规律趋于零,但并不取得零值.现在就令在$\Delta x=0$时$\alpha =0$;那时公式$\eqref{2} $在$\Delta x=0$时自然仍为有效.然除此以外,$\Delta x\to 0$时$\alpha \to 0$这一关系却可比以前得到更广义的理解,就是在$\Delta x$趋于零的过程中,它也可以取等于零的数值了.
由已证明的公式直接推得:
$2^{\circ} \quad $若函数$y=f(x)$在点$x_0 $处有(有限的)导数,则函数在这点必然是连续的.
实因,由$\eqref{21} $,很清楚地,由$\Delta x\to 0$的关系就立即引出$\Delta y\to 0$.
求导数的几个简单法则
在前几目内我们已求出初等函数的导数.在这一目及下面一目内,我们将建立一系列的法则,用了它们就可以求任何由初等函数经过有限次的算术运算及叠置[函数的叠置.总结]所得出的函数的导数.
Ⅰ.设函数$u=\varphi (x)$(在定点$x$处)有导数$u’$.我们要证明,函数$y=cu$($c=$常数)(在同一点处)也有导数,并求出它.
若自变量$x$得一增量$\Delta x$,则函数$u$亦得一增量$\Delta u$,而由开始的数值$u$变为数值$u+\Delta u$.函数$y$的新值就是$y+\Delta y=c(u+\Delta u)$.
由此$\Delta y=c\cdot \Delta u$而
$$\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =c\cdot \lim_{\Delta x\to 0} \dfrac{\Delta u}{\Delta x} =c\cdot u’.$$
因此,导数存在且等于
$$y’=(c\cdot u)’=c\cdot u’.$$
这公式表示这样一条法则:常数因子可以从导数的符号内取出.
Ⅱ.设函数$u=\varphi (x),v=\phi (x)$,(在定点$x$处)有导数$u’,v’$.今证明,函数$y=u\pm v$(在同一点处)也有导数,并求出它.
给$x$以增量$\Delta x$;于是$u,v$及$y$就对应地各得增量$\Delta u ,\Delta v$及$\Delta y$.它们的新值$u+\Delta u$,$v+\Delta v$及$y+\Delta y$可用同样的关系式连接着:
$$y+\Delta y=(u+\Delta u)\pm (v+\Delta v),$$
由此
$$\Delta y=\Delta u\pm \Delta v,\dfrac{\Delta y}{\Delta x} =\dfrac{\Delta u}{\Delta x} \pm \dfrac{\Delta v}{\Delta x} $$
而
$$\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\lim_{\Delta x\to 0} \dfrac{\Delta u}{\Delta x} \pm \lim_{\Delta x\to 0} \dfrac{\Delta v}{\Delta x} =u’\pm v’,$$
于是导数$y’$存在且等于
$$y’=(u\pm v)’=u’\pm v’.$$
这结果可以很容易地推广到任意有限个加数的情形(用同样的方法).
Ⅲ.在关于函数$u,v$的同样的假定下,我们证明,函数$y=u\cdot v$也有导数,并求出它.
同上面一样,对应于增量$\Delta x$有增量$\Delta u,\Delta v$及$\Delta y$;这时$y+\Delta y=(u+\Delta u)(v+\Delta v)$,于是
$$\Delta y=\Delta u\cdot v+u\cdot \Delta v+\Delta u\cdot \Delta v$$
及
$$\dfrac{\Delta y}{\Delta x} =\dfrac{\Delta u}{\Delta x} \cdot v+u\cdot \dfrac{\Delta v}{\Delta x} +\dfrac{\Delta u}{\Delta x} \cdot \Delta v.$$
因为根据[函数的增量的公式,$2^{\circ }$],当$\Delta x\to 0$也有$\Delta v\to 0$,故
$$\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =\lim_{\Delta x\to 0} \dfrac{\Delta u}{\Delta x} \cdot v +u \cdot \lim_{\Delta x\to 0} \dfrac{\Delta v}{\Delta x} =u’\cdot v+u\cdot v’,$$
即导数$y’$存在并等于
$$y’=(u\cdot v)’=u’\cdot v+u\cdot v’.$$
若$y=uvw$,并且$u’,v’,w’$都存在,则
$$y’=[(uv)\cdot w]’=(uv)’\cdot w+(uv)\cdot w’=u’vw+uv’w+uvw’.$$
很易判断,在$n$个因子相乘时将类似地有:
$$[\overbrace{uvw\cdots s}^{n} ]’=u’vw\cdots s+uv’w\cdots s+uvw’\cdots s+\cdots +uvw\cdots s’.\label{4} \tag{4} $$
要证明这事,我们利用数学归纳法.假定公式$\eqref{4} $在$n$个因子相乘时是真实的,再证明它在$(n+1)$个因子相乘时也是真实的:
$$[\overbrace{uvw\cdots st}^{n+1} ]’=[\overbrace{uvw\cdots s}^{n} \cdot t]’=(uvw\cdots s)’\cdot t+(uvw\cdots s)\cdot t’;$$
将导数$(uvw\cdots s)’$依公式$\eqref{4} $展开,就得出公式
$$[uvw\cdots st]’=u’vw\cdots st+uv’w\cdots st+\cdots +uvw\cdots s’t+uvw\cdots st’,$$
完全类似于$\eqref{4} $.因为公式$\eqref{4} $在$n=2$及$3$时的真实性我们已直接证明了,所以这公式对于任意的$n$也是真实的.
Ⅳ.最后,若$u,v$满足于前面的假定,此外,又假定$v$异于零,则我们将证明,函数$y=\dfrac{u}{v} $也有导数,并求出它.
用上面一样的表示法,就有
$$y+\Delta y=\dfrac{u+\Delta u}{v+\Delta v} ,$$
于是
$$\Delta y=\dfrac{\Delta u\cdot v-u\cdot \Delta v}{v(v+\Delta v)} ,$$
而
$$\dfrac{\Delta y}{\Delta x} =\dfrac{\dfrac{\Delta u}{\Delta x} \cdot v-u\cdot \dfrac{\Delta v}{\Delta x} }{v\cdot (v+\Delta v)} .$$
在此处使$\Delta x$趋向于零(则同时亦有$\Delta v\to 0$),就证明了导数的存在,且
$$y’=\left( \dfrac{u}{v} \right)’=\dfrac{u’\cdot v-u\cdot v’}{v^2} .$$
复合函数的导数
现在我们可以建立一条在实际求导数时十分重要的法则.只要被组合的各个函数的导数已经知道时,我们就能够按法则来求复合函数的导数.
Ⅴ.设$1)$函数$u=\varphi (x)$在某一点$x_0 $处有导数$u’_x =\varphi’(x_0 )$,$2)$函数$y=f(u)$在对应点$u_0 =\varphi (x_0 )$也有导数$y’_u =f’(u)$.于是复合函数$y=f(\varphi (x))$在上述的点$x_0 $处亦将有导数,它等于$f(u)$的导数与$\varphi(x) $的导数的乘积:
$$[f(\varphi (x_0 ))]’ =f’_u (\varphi (x_0 )) \cdot \varphi’(x_0 ),$$
须着重指出,记号$f’_u (\varphi (x_0 ))$表示函数$f(u)$关于变元$u$(并非关于$x$)的导数在这个变元取值$u_0 =\varphi (x_0 )$时的值.
或更简短地
$$y’_x =y’_u \cdot u’_x .$$
为了证明,给$x$以任意增量$\Delta x$;设$\Delta u$是函数$u=\varphi (x)$的对应增量,又最后,$\Delta y$是增量$\Delta u$所引起的函数$y=f(u)$的增量.利用关系式$\eqref{21} $,把$x$换成$u$,就改写成
$$\Delta y=y’_u \cdot \Delta u+\alpha \cdot \Delta u$$
($\alpha $依赖于$\Delta u$并与它一同趋向于零).用$\Delta x$除各项,就得
$$\dfrac{\Delta y}{\Delta x} =y’_u \cdot \dfrac{\Delta u}{\Delta x} +\alpha \cdot \dfrac{\Delta u}{\Delta x} .$$
若$\Delta x$趋于零,则$\Delta u$亦趋向于零[函数的增量的公式,$2^{\circ }$],于是,我们知道,依赖于$\Delta u$的量$\alpha $亦将趋于零.因此,有极限存在
$$\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =y’_u \cdot \lim_{\Delta x\to 0} \dfrac{\Delta u}{\Delta x} =y’_u \cdot u’_x ,$$
它就是所求的导数$y’_x $.
附注$\quad $在此处就表现了[函数的增量的公式]中的附注的用处了:当$\Delta x$是自变量的增量时,我们可以假定它异于零,但对于$x$的函数$u=\varphi (x)$的增量$\Delta u$来说,即使在$\Delta x\neq 0$时我们也没有权利设想$\Delta u\neq 0$了.
例题
以下用字母$x,y,u,v$表示变量,而别的字母就表示常量.
先举几个应用法则Ⅰ~Ⅳ的例题.
$1)$考察多项式:
$$y=a_0 x^n +a_1 x^{n-1} +\cdots +a_{n-2} x^2 +a_{n-1} x+a_n .$$
先依法则Ⅱ,再依法则Ⅰ,就有
$$\begin{align}
y’ & = (a_0 x^n )’+(a_1 x^{n-1} )’+\cdots +(a_{n-2} x^2 )’+(a_{n-1} x)’+(a_n )’ \\
& =a_0 (x^n)’ +a_1 (x^{n-1})’ +\cdots +a_{n-2} (x^2)’+a_{n-1} (x)’+(a_n )’ .
\end{align}$$
利用[导数公式一览表]公式$1,2,3$,最后得
$$y’=na_0 x^{n-1} +(n-1)a_1 x^{n-2} +\cdots +2a_{n-2} x+a_{n-1} .$$
$2)\;y=(2x^2-5x+1)\cdot e^x$.依法则Ⅲ
$$y’=(2x^2-5x+1)’\cdot e^x +(2x^2-5x+1)\cdot (e^x)’ .$$
根据前一例题及[导数公式一览表]公式$4$,求出
$$y’=(4x-5)\cdot e^x +(2x^2-5x+1)\cdot e^x =(2x^2-x-4)\cdot e^x .$$
$3)\;y=\dfrac{ax+b}{x^2+1} $.依法则Ⅳ,
$$\begin{align}
y’ & = \dfrac{(ax+b)’(x^2+1)-(ax+b)(x^2+1)’}{(x^2+1)^2} \\
& =\dfrac{a(x^2+1)-(ax+b)\cdot 2x}{(x^2+1)^2} \\
& =\dfrac{-ax^2-2bx+a}{(x^2+1)^2} .\\
\end{align}$$
$4)$再求函数$y=\tan{x} $的导数,从公式$y=\dfrac{\sin{x} }{\cos{x} } $出发.应用法则Ⅳ(及[导数公式一览表]的公式$6,7$)得
$$\begin{align}
y’ & = \dfrac{(\sin{x} )’\cdot \cos{x} -\sin{x} \cdot (\cos{x} )’}{\cos{} ^2 x} \\
& =\dfrac{\cos{} ^2 x+\sin{} ^2 x}{\cos{} ^2 x} \\
& =\dfrac{1}{\cos{} ^2 x} \\
\end{align}$$
(参阅[导数公式一览表],$8$).
$5)\;y=\dfrac{x\sin{x} +\cos{x} }{x\cos{x} -\sin{x} } $.在这里必须先应用法则Ⅳ,再应用法则Ⅱ及Ⅲ(及[导数公式一览表]公式$6,7$):
$$\begin{align}
y’ & = \dfrac{(x\sin{x} +\cos{x} )’(x\cos{x} -\sin{x} ) -(x\sin{x} +\cos{x} )(x\cos{x} -\sin{x} )’}{(x\cos{x} -\sin{x} )^2} \\
& = \dfrac{x\cos{x} \cdot (x\cos{x} -\sin{x} ) -(x\sin{x} +\cos{x} )\cdot (-x\sin{x} )}{(x\cos{x} -\sin{x} )^2} \\
& = \dfrac{x^2}{(x\cos{x} -\sin{x} )^2} .\\
\end{align}$$
这里分子与分母的导数是立刻算出的,并未分开为两个步骤.通过习题必须达到一般地能立刻写出导数的地步.
求复合函数的导数的例题:
$6)$设$y=\ln \sin{x} $,换言之,$y=\ln u$,$u=\sin{x} $.依法则Ⅴ,$y’_x =y’_u \cdot u’_x $.导数$y’_u =(\ln u)’_u =\dfrac{1}{u} $(公式$5$)应当对$u=\sin{x} $来取.这样
$$y’_x =\dfrac{1}{\sin{x} } \cdot (\sin{x} )’=\dfrac{\cos{x} }{\sin{x} } =\cot{x} .\tag{公式6} $$
$7)\;y=\sqrt{1+x^2} $,即$y=\sqrt{u} $,式中$u=1+x^2 $;依法则Ⅴ,
$$y’_x =\dfrac{1}{2\sqrt{1+x^2} } \cdot (1+x^2)’=\dfrac{x}{\sqrt{1+x^2} } .\tag{公式3,例1} $$
$8)\;y=e^{x^2} $,即$y=e^u $,式中$u=x^2$;
$$y’_x =e^{x^2} \cdot (x^2)’=2x\cdot e^{x^2} .\tag{Ⅴ;4及3} $$
当然,把被叠置的函数各别地写出来在事实上没有这种必要.
$9)\;y=\sin{ax} $;
$$y’_x =\cos{ax} \cdot (ax)’=a\cdot \cos{ax} .\tag{Ⅴ;7,1,2} $$
$10)\;y=(x^2+x+1)^n $;
$$y’_x =n(x^2+x+1)^{n-1} \cdot (x^2+x+1)’=n(2x+1)(x^2+x+1)^{n-1} .\tag{Ⅴ;3,例1} $$
$11)\;y=2^{\sin{x} } $;
$$y’_x =2^{\sin{x} } \cdot \ln 2 \cdot (\sin{x} )’=\ln 2 \cdot \cos{x} \cdot 2^{\sin{x} } .\tag{Ⅴ;4,6} $$
$12)\;y=\arctan{\dfrac{1}{x} } $;
$$y’_x =\dfrac{1}{1+\left( \dfrac{1}{x} \right) ^2} \cdot \left( \dfrac{1}{x} \right)’ =\dfrac{x^2}{1+x^2} \cdot \left( -\dfrac{1}{x^2} \right) =-\dfrac{1}{1+x^2} .\tag{Ⅴ;12,3} $$
碰到几层叠置的复合函数,就要毫无遗漏地逐次应用法则Ⅴ:
$13)\;y=\sqrt{\tan{\dfrac12 x} } $;于是
$$\begin{align}
y’_x & =\dfrac{1}{2\sqrt{\tan{\dfrac12 x} } } \cdot \left( \tan{\dfrac12 x} \right)’_x \tag{Ⅴ;3} \\
& = \dfrac{1}{2\sqrt{\tan{\dfrac12 x} } } \cdot \sec{} ^2 \dfrac12 x \cdot \left( \dfrac12 x\right)’_x =\dfrac{\sec{} ^2 \dfrac12 x}{4\sqrt{\tan{\dfrac12 x} } } .\tag{Ⅴ;8}
\end{align}$$
$14)\;y=e^{\sin{} ^2 \frac{1}{x} } $;在这情形
$$\begin{align}
y’_x & =e^{\sin{} ^2 \frac{1}{x} } \cdot \left( \sin{} ^2 \dfrac{1}{x} \right)’_x \tag{Ⅴ;4} \\
& =e^{\sin{} ^2 \frac{1}{x} } \cdot 2\sin{\dfrac{1}{x} } \cdot \left( \sin{1}{x} \right)’_x \tag{Ⅴ;3} \\
& =e^{\sin{} ^2 \frac{1}{x} } \cdot 2\sin{\dfrac{1}{x} } \cdot \cos{\dfrac{1}{x} } \cdot \left( \dfrac{1}{x} \right)’_x \tag{Ⅴ;6} \\
& =-\dfrac{1}{x^2} \cdot \sin{\dfrac{2}{x} } \cdot e^{\sin{} ^2 \frac{1}{x} } .\tag{Ⅴ;3}
\end{align}$$
再举几个例题来应用一切的法则:
$15)\;y=\sinh{x} =\dfrac{e^x -e^{-x} }{2} $;
$$y’=\dfrac12 [(e^x)’_x -(e^{-x})’_x] =\dfrac{e^x+e^{-x} }{2} =\cosh{x} .$$
反之,若$y=\cosh{x} $,则$y’=\sinh{x} $.最后,同$4)$那样,很易得出:
若$y=\tanh{x} =\dfrac{\sinh{x} }{\cosh{x} } $,则$y’=\dfrac{1}{\cosh{} ^2 x} ,$
又若$y=\coth{x} $,则$y’=\dfrac{1}{\sinh{} ^2 x} $.
$16)\;y=\ln (x+\sqrt{x^2+1} ) $;
$$\begin{align}
y’_x & =\dfrac{1}{x+\sqrt{x^2+1} } \cdot (x+\sqrt{x^2+1} )’_x \\
& = \dfrac{1}{x+\sqrt{x^2+1} } \cdot \left( 1+\dfrac{x}{\sqrt{x^2+1} } \right) \\
& =\dfrac{1}{\sqrt{x^2+1} } .
\end{align}$$
这结果亦可以从别的想法得出.我们已在[反函数的概念,4)]内看到,函数$y=\ln (x+\sqrt{x^2+1} ) $就是函数$x=\sinh{y} $的反函数;因此[反函数的导数];例15;[几类最重要的函数,6°]
$$y’_x =\dfrac{1}{x’_y } =\dfrac{1}{\cosh{y} } =\dfrac{1}{\sqrt{\sinh{} ^2 y+1} } =\dfrac{1}{\sqrt{x^2+1} } .$$
$17)\;y=\dfrac{x}{a^2 \sqrt{x^2+a^2} } $;
$$y’=\dfrac{1}{a^2} \cdot \dfrac{1\cdot \sqrt{x^2+a^2} -x\cdot \dfrac{x}{\sqrt{x^2+a^2} } }{(\sqrt{x^2+a^2} )^2} =\dfrac{1}{(x^2+a^2)^{3/2} } .$$
$18)\;y=\dfrac12 \arctan{\dfrac{2x}{1-x^2} } \quad (-1 < x < 1)$;
$$y’=\dfrac12 \cdot \dfrac{1}{1+\left( \dfrac{2x}{1-x^2} \right) ^2} \cdot 2\cdot \dfrac{1\cdot (1-x^2)-x\cdot (-2x)}{(1-x^2)^2} =\dfrac{1}{1+x^2} .$$
$19)\;y=\dfrac{1}{\sqrt{b-ac} } \ln \dfrac{\sqrt{ax+b} -\sqrt{b-ac} }{\sqrt{ax+b} +\sqrt{b-ac} } $.
(我们假定:$b-ac > 0$);
$$y’=\dfrac{1}{\sqrt{b-ac} } \left[ \dfrac{\dfrac{a}{2\sqrt{ax+b} } }{\sqrt{ax+b} -\sqrt{b-ac} } -\dfrac{\dfrac{a}{2\sqrt{ax+b} } }{\sqrt{ax+b} +\sqrt{b-ac} } \right] =\dfrac{1}{(x+c)\sqrt{ax+b} } .$$
$20)\;y=\dfrac{2}{\sqrt{ac-b} } \arctan{\sqrt{\dfrac{ax+b}{ac-b} } } $.
(此处假定:$ac-b > 0$);
$$y’=\dfrac{2}{\sqrt{ac-b} } \cdot \dfrac{1}{1+\dfrac{ax+b}{ac-b} } \cdot \dfrac{1}{\sqrt{ac-b} } \cdot \dfrac{a}{2\sqrt{ax+b} } =\dfrac{1}{(x+c)\sqrt{ax+b} } .$$
$21)\;y=\dfrac{1}{\sqrt{a^2-b^2} } \arcsin{\dfrac{a\sin{x} +b}{a+b\sin{x} } } \quad \left( \vert b\vert < a ;-\dfrac{\pi }{2} < x < \dfrac{\pi }{2} \right) $;
$$\begin{align}
y’ =& \dfrac{1}{\sqrt{a^2-b^2} } \cdot \dfrac{1}{\sqrt{1-\left( \dfrac{a\sin{x} +b}{a+b\sin{x} } \right) ^2} }\\
& \times \dfrac{a\cos{x} \cdot (a+b\sin{x} ) -(a\sin{x} +b)\cdot b\cos{x} }{(a+b\sin{x} )^2} =\dfrac{1}{a+b\sin{x} } .\\
\end{align}$$
$22)\;y=\dfrac{1}{\sqrt{b^2-a^2} } \ln \dfrac{b+a\sin{x} -\sqrt{b^2-a^2} \cdot \cos{x} }{a+b\sin{x} } \quad (\vert a\vert < \vert b\vert )$;
$$y’=\dfrac{1}{\sqrt{b^2-a^2} } \left[ \dfrac{a\cos{x} +\sqrt{b^2-a^2} \sin{x} }{b+a\sin{x} -\sqrt{b^2-a^2} \cos{x} } -\dfrac{b\cos{x} }{a+b\sin{x} } \right] =\dfrac{1}{a+b\sin{x} } .$$
$23)$作为一个习题,我们再来研究关于幂指数式$y=u^v(u > 0)$的导数的问题,式中$u$及$v$是$x$的函数,并在所给点有导数$u’,v’$.
把等式$y=u^v$取对数,就得
$$\ln y=v\cdot \ln u.\label{5} \tag{5} $$
这样,$y$的表达式就可以改写成为$y=e^{v\ln u}$,由此已经很清楚,导数$y’$存在.它的求法还可以更简单地做出,就是使$\eqref{5} $两边的关于$x$的导数相等.这时我们利用法则Ⅴ及Ⅲ(记住$u,v$及$y$是$x$的函数),就得到
$$\dfrac{1}{y} y’=v’\cdot \ln u+v\cdot \dfrac{1}{u} \cdot u’,$$
由此
$$y’=y\left( \dfrac{vu’}{u} +v’\ln u \right) ,$$
或用$y$的表达式代换它,
$$y’=u^v \left( \dfrac{vu’}{u} +v’\ln u \right) .\label{6} \tag{6} $$
这公式是莱布尼茨和J.伯努利(Johann Bernoulli)首先建立的.
例如,若$y=x^{\sin{x} } $,则$y’=x^{\sin{x} } \left( \dfrac{\sin{x} }{x} +\cos{x} \cdot \ln u \right) $.
$24)$假定函数$f(x)$有导数$f’(x)$,写出下列函数的关于$x$的导数式
$$(а)\;\sin{f(x)},\quad (б)\;e^{f(x)},\quad (в)\;\ln f(x),$$
并写出下列函数的关于$t$的导数式
$$(г)\;f(\sin{t} ),\quad (д)\;f(e^t),\quad (е)\;f(\ln t),$$
答:
$$(а)\;\cos{f(x)} \cdot f’(x);\quad (б)\;e^{f(x)} \cdot f’(x);\quad (в)\;\dfrac{f’(x)}{f(x)} ;$$
$$(г)\;f’(\sin{t} )\cdot \cos{t} ;\quad (д)\;f’(e^t)\cdot e^t,\quad (е)\;f’(\ln t)\cdot \dfrac{1}{t} .$$
关于最后的三个例题$(г),(д),(е)$,请读者注意,记法$f’(\cdots )$表示函数$f(x)$关于它所依赖的变元$x$的导数,但在这变元的数值各为$x=\sin{t} ,e^t ,\ln t$时,$f’(\cdots )$已经依赖于$t$了.参阅[复合函数的导数]的脚注.
$25)$函数$f(x)$是在关于$0$对称的区间内定义的,若$f(-x)=f(x)$,它就称为偶函数;若$f(-x)=-f(x)$,它就称为奇函数(偶函数的例子,如偶次幂函数$x^2 ,x^4,\cdots $,以及$\cos{x} ,\cosh{x} $;奇函数的例子,如奇次幂函数$x,x^3 ,\cdots ,\sin{x} ,\sinh{x} $.)
试证明,偶函数的导数(假如存在)为奇函数,而奇函数的导数为偶函数.
证明:设可导的偶函数$f(x)$,则$f(-x)=f(x)$,两边求导,得
$$f’(-x)\cdot (-x)’=f’(x) $$
即$f’(-x)=-f’(x)$,故$f’(x)$是奇函数.
所以偶函数的导数(假如存在)为奇函数.同理可证奇函数的导数为偶函数.
$26)$求出函数$y=\ln \vert x\vert $在$x\gtrless 0$时的导数.
在$x > 0$时,显然$y’=\dfrac{1}{x} $;今将指出这公式在$x < 0$时仍为适用.实际上,把函数
$$y=\ln \vert x\vert =\ln (-x)$$
当作复合函数而求其导数,那么,在这种情形,就亦有
$$y’=\dfrac{1}{-x} \cdot (-1)=\dfrac{1}{x} .$$
$27)$考察曲线
$$y=ax^n (n > 0).$$
在其上某一点$(x,y)$处的切线的斜率是[在曲线上作切线问题]~[导数的定义]:
$$\tan{\alpha } =y’=nax^{n-1} .$$
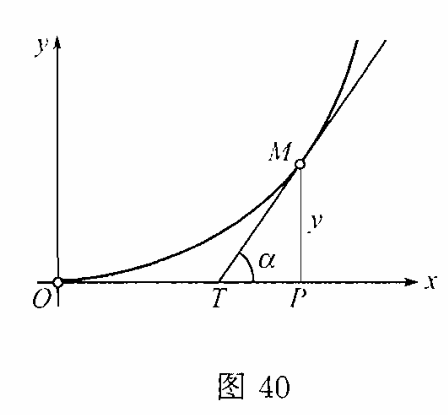
由图$40$看出,线段$TP$(所谓“次切距”)等于
$$TP=\dfrac{y}{\tan{\alpha } } =\dfrac{ax^n }{nax^{n-1} } =\dfrac{x}{n} .$$
利用这事实可得到切线的简易作图法([在曲线上作切线问题]的结果的推广).
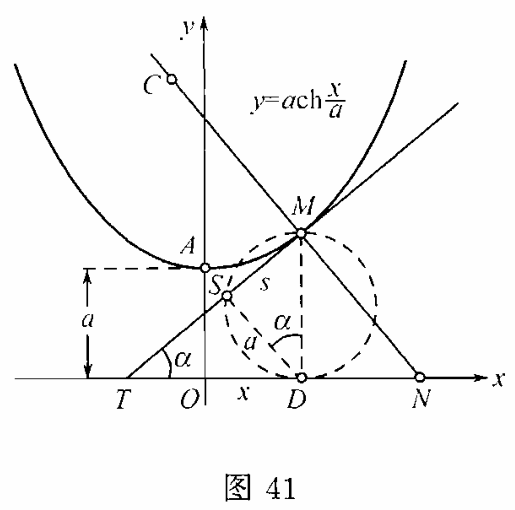
$28)$对于曲线(“悬链线”)
$$y=a\cdot \cosh{\dfrac{x}{a} } (a > 0),$$
用相似的方法,得
$$\tan{\alpha } =y’=\sinh{\dfrac{x}{a} } .$$
在这次定义(设想$x > 0$)
$$\cos{\alpha } =\dfrac{1}{\sqrt{1+\tan{} ^2 \alpha } } =\dfrac{1}{\sqrt{1+\sinh{} ^2 \dfrac{x}{a} } } =\dfrac{1}{\cosh{\dfrac{x}{a} } } =\dfrac{a}{y} ,$$
于是$y\cdot \cos{\alpha } =a$.若从纵标$y=DM$的中$D$(图$41$)作切线$MT$的垂线$DS$,则线段$DS$就等于$a$.由此再推得在所考察的曲线上作切线的简易作图法;把纵标$DM$当作直径作一半圆,以$D$为中心,$a$为直径截取交点$S$;直线$MS$就是切线.
$29)$设质点沿着一轴在某一中心点的附近依下列规律而振动:
$$S=A\cdot \sin{(\omega t+\alpha )} \quad (A,\omega > 0).$$
这种振动称为简谐运动;$A$是它的振幅,$\omega $是频率,$\alpha $是初相.
取路程$S$关于时间$t$的导数,求得运动的速度:
$$v=A\omega \cdot \cos{\omega t+\alpha } .$$
当$S=0$时,即点经过中心时,速度达到最大的数值$\pm A\omega $.反之,当点的位置离中心最远时($S=\pm A$)速度$v=0$.
求$v$关于$t$的导数:
$$a=-A\omega ^2 \cdot \sin{(\omega t+\alpha )} $$
给出点的运动的加速度;显然
$$a=-\omega ^2 \cdot S.$$
由此,引入动点的质量$m$,依牛顿定律,若简谐振动是由于力$F$的作用而发生,则这力$F$可表示为:
$$F=-m\omega ^2 \cdot S.$$
由此看出,它永远指向中心(因为有与$S$相反的符号),并与点离中心的距离成比例.
$30)$依规律
$$S=Ae^{-kt} \sin{\omega t} \quad (A,k,\omega > 0)$$
而发生的运动称为阻尼振动,因为有因式$e^{-kt}$存在,虽则质点也在中心点附近作振动,但总是逐渐趋向于和中心点重合:
$$\lim_{t\to \infty } S=0.$$
在这种情形
$$v=S’_t =Ae^{-kt} (\omega \cdot \cos{\omega t} -k\cdot \sin{\omega t} ) $$
又
$$a=v’_t =-Ae^{-kt} (\omega ^2 \cdot \sin{\omega t} +2\omega k\cdot \cos{\omega t} -k^2 \cdot \sin{\omega t} ) .$$
再在括号内引入$\pm k^2\cdot \sin{\omega t} $,在明显的变形以后,就得
$$\begin{align}
a & =-Ae^{-kt} [(\omega ^2 +k^2)\sin{\omega t} +2k(\omega \cdot \cos{\omega t} -k\cdot \sin{\omega t} )] \\
& =-(\omega ^2 +k^2)\cdot S-2k\cdot v.
\end{align}$$
若这种振动是由于力$F$的作用而发生,则$F$等于
$$F=-(\omega ^2+k^2)m\cdot S-2km\cdot v.$$
我们看出,它是由两种力:$1)$与质点离中心的距离成正比且指向着这中心的力(同在调和振动的情形一样),及$2)$与速度成正比且与速度方向相反的阻挠运动的力,相加而成的.
单侧导数
在结束这一节时,我们来考察一些关于导数可能产生的特殊情形.先从建立单侧导数的概念开始.若所考察的数值$x$就是函数$y=f(x)$的定义区间$\mathcal{X}$的端点之一,则在求比式$\dfrac{\Delta y}{\Delta x} $的极限时,$\Delta x $接近于零时就仅限于从右(当讲到区间的左端点时)或从左(右端点时).在这种情形若极限存在,就称为右导数或左导数.函数的图像在对应点处就有单侧切线.
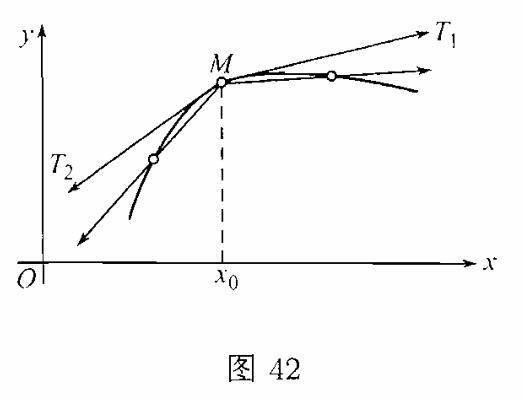
也可能碰到,在内点$x$处比式$\dfrac{\Delta y}{\Delta x} $仅各有单侧极限存在(在$\Delta x\to +0$或$\Delta x\to -0$时),且并不相等;它们也称为单侧导数.函数的图像在对应点处将仅有两单侧切线存在,它们组成一角;该点就是角点(图$42$).
考察函数$y=f(x)=\vert x\vert $作为一例.从数值$x=0$出发,将有
$$\Delta y=f(0+\Delta x) -f(0)=f(\Delta x) =\vert \Delta x\vert .$$
若$\Delta x > 0$,则
$$\Delta y=\Delta x,\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =1.$$
又若$\Delta x < 0$,则
$$\Delta y=-\Delta x,\lim_{\Delta x\to 0} \dfrac{\Delta y}{\Delta x} =-1.$$
这函数的图像由第一及第二象限角的分角线所组成,原点就成为角点.
无穷导数
若增量的比式$\dfrac{\Delta y}{\Delta x} $在$\Delta x\to 0$时趋于$+\infty (-\infty )$,则这一广义的数也称为导数(且像通常那样表示着).单侧无穷导数的概念也可类似地建立起来.导数的几何说明(作为是切线的斜率)也可推广到这一情形;但在此处,切线是平行于$y$轴的(图$43,а,б,в,г$).
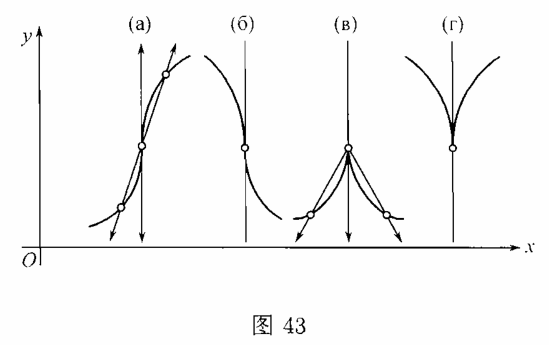
在$(а)$及$(б)$的情形,这导数各等于$+\infty $及$-\infty $(两个单侧导数符号相同),而在$(в)$及$(г)$的情形两个单侧导数符号相异.
例如,设$f_1 (x)=x^{\frac{1}{3} } $;在$x\neq 0$时,[导数公式一览表]的公式$3$给出
$$f’_1 (x)=\dfrac{1}{3} x^{-\frac{2}{3} } =\dfrac{1}{3x^{\frac{2}{3} } } ,$$
但它在$x=0$时是不能用的.我们要求在这点处的导数,就应直接从导数的定义出发;作比式
$$\dfrac{f_1 (0+\Delta x)-f_1 (0)}{\Delta x} =\dfrac{(\Delta x)^{\frac13 } }{\Delta x} =\dfrac{1}{\Delta x^{\frac23 } } ,$$
我们看出,当$\Delta x\to 0$时它的极限就是$+\infty $.同样可以相信,对于函数$f_2 (x)=x^{\frac{2}{3} } $,在$x=0$时,左导数等于$-\infty $,而右导数等于$+\infty $.
应用导数概念的推广,可以补充[反函数的导数]中关于反函数的导数的定理,指出即使在那种情形,即当$f’(x_0 )$等于$0$或$\infty $时,反函数的导数$g’(y_0 )$仍存在,而且各等于$\infty $或$0$.例如,因为函数$\sin{x}$在$x=\pm \dfrac{\pi }{2} $时有导数$\cos{\left( \pm \dfrac{\pi }{2} \right) } =0$,故反函数$\arcsin{y}$在$y=\pm 1$时有无穷导数(就是$+\infty $)存在.
特殊情形的例题
$1^{\circ } \quad $导数不存在的例题
已经说过函数$y=\vert x\vert $在点$x=0$处[参阅[单侧导数]]并无通常的双侧导数.但更有趣的是这样的例题,函数
$$f(x)=x\cdot \sin{\dfrac{1}{x} } (x\neq 0时),\quad f(0)=0,$$
在$x=0$时也是连续的[间断函数的例题],但在这点却连单侧导数都没有.事实上,比式
$$\dfrac{f(0+\Delta x)-f(0)}{\Delta x} =\dfrac{f(\Delta x)}{\Delta x} =\sin{\dfrac{1}{\Delta x} } $$
在$\Delta x\to \pm 0$时不趋于任何极限.
由这函数的图像(图$24$)很容易看出,从原点$O$引出的割线$OM_1 $在$M_1 $趋于$O$时并无极限位置,因此曲线在原点处没有切线(即使是单侧的也没有).
在以后[第二卷]我们将再举一个值得注意的例题,一函数在变元的一切数值时是连续的,但在其中任何数值时都没有导数.
$2^{\circ } \quad $导数间断的例题
若所给函数$y=f(x)$在某一区间$\mathcal{X} $内的每一点处有有限导数$y’=f’(x)$存在,则这导数本身也是$\mathcal{X} $内的$x$的函数.到现在为止,我们所碰到的例子内,函数$f(x)$都是连续的.然而,这也可能并不如此.例如,考察函数
$$f(x)=x^2 \cdot \sin{\dfrac{1}{x} } (x\neq 0时),\quad f(0)=0.$$
若$x\neq 0$,则用通常的方法就求出它的导数
$$f’(x)=2x\cdot \sin{\dfrac{1}{x} } -\cos{\dfrac{1}{x} } ,$$
但所得的结果在$x=0$时是不能用的.在这种情形,直接用导数概念的定义来讨论,就有
$$f’(0)=\lim_{\Delta x\to 0} \dfrac{f(0+\Delta x)-f(0)}{\Delta x} =\lim_{\Delta x\to 0} \Delta x\cdot \sin{\dfrac{1}{\Delta x} } =0.$$
同时,清楚地,$f’(x)$在$x\to 0$时并不趋于任何极限,因此在$x=0$时函数$f’(x)$有间断.
这对于任意的函数
$$f(x)=x^{\alpha } \cdot \sin{\dfrac{1}{x} } (x\neq 0时),\quad f(0)=0,$$
只要$2 > \alpha > 1$,也同样是真空的.
在这些例题内,导数的间断都是属于第二类的.这并非偶然的事件:下面[导数的极限]我们将看到,导数不能有第一类的间断,即跃度.
